アクション通信¶
アクション通信は一言で言うと、前回学んだトピック通信とサービス通信の両方を組み合わせたようなものです。 リクエスを送るクライアントと、受け取ったリクエスに応じてレスポンスを返すサーバが存在します。 アクション通信の特徴として、サーバはレスポンスを返すまで、途中経過の値をクライアントに送り続けることが出来ます。
注釈
アクション通信は使う頻度が少ない(?)ので飛ばしても大丈夫です。 必要になったら勉強してください。
今回の目標¶
今回は以下のようなノードをもつhello_actionパッケージを作ってみましょう。
server_node.pyhello_msgs/Sum型の/sumアクションからリクエスをを受け取り、クライアントにレスポンスを返すgoalをクライアントから受け取り、1からgoalまでの総和をクライアントに送る目標の値(
goal)をgoalとして受け取る総和の途中経過の値(
tmp_sum)をfeedbackとして送る総和(
sum)をresultとして送る
client_node.pyhello_msgs/Sum型の/sumアクションにリクエストを送って、サーバからレスポンスを受け取るgoalをサーバに送り、1からgoalまでの総和をサーバから受け取る目標の値(
goal)をgoalとして送る総和の途中経過の値(
tmp_sum)をfeedbackとして受け取る総和(
sum)をresultとして受け取る
パッケージの作成¶
ros2 pkg create --build-type ament_python hello_action
server_node.pyのコード¶
hello_action/server_node.pyを以下の内容で書き込む。
import rclpy
from rclpy.node import Node
from rclpy.action import ActionServer
from hello_msgs.action import Sum
import time
class Server(Node):
def __init__(self):
super().__init__("server_node")
self.sum_server = ActionServer(self, Sum, "sum", self.sum_callback)
def sum_callback(self, goal_handle):
goal = goal_handle.request.goal
self.get_logger().info(f"Recieved goal: {goal}")
num = 0
feedback_msg = Sum.Feedback()
feedback_msg.tmp_sum = num
for i in range(1, goal):
feedback_msg.tmp_sum += i
goal_handle.publish_feedback(feedback_msg)
self.get_logger().info(f"Sending feedback: {feedback_msg.tmp_sum}")
time.sleep(0.5)
goal_handle.succeed()
result = Sum.Result()
result.sum = feedback_msg.tmp_sum
self.get_logger().info(f"Sending result: {result.sum}")
return result
def main(args=None):
rclpy.init(args=args)
node = Server()
rclpy.spin(node)
client_node.pyのコード¶
hello_action/client_node.pyを以下の内容で書き込む。
import rclpy
from rclpy.action import ActionClient
from rclpy.node import Node
from hello_msgs.action import Sum
class Client(Node):
def __init__(self):
super().__init__("client_node")
self.sum_client = ActionClient(self, Sum, "sum")
def send_goal(self, goal):
self.get_logger().info(f"Sending goal: {goal}")
goal_msg = Sum.Goal()
goal_msg.goal = goal
self.sum_client.wait_for_server()
self.send_goal_future = self.sum_client.send_goal_async(goal_msg, feedback_callback=self.feedback_callback)
self.send_goal_future.add_done_callback(self.goal_response_callback)
def goal_response_callback(self, future):
goal_handle = future.result()
if not goal_handle.accepted:
self.get_logger().info("Goal rejected...")
return
self.get_logger().info("Goal accepted!")
self.get_result_future = goal_handle.get_result_async()
self.get_result_future.add_done_callback(self.get_result_callback)
def get_result_callback(self, future):
result = future.result().result
self.get_logger().info(f"Result: {result.sum}")
rclpy.shutdown()
def feedback_callback(self, feedback_msg):
feedback = feedback_msg.feedback
self.get_logger().info(f"Recieved feedback: {feedback.tmp_sum}")
def main(args=None):
rclpy.init(args=args)
node = Client()
node.send_goal(10)
rclpy.spin(node)
setup.pyの編集¶
from setuptools import find_packages, setup
package_name = 'hello_action'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='ri-one',
maintainer_email='ri-one@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
# この2行を追加
'server_node = hello_action.server_node:main',
'client_node = hello_action.client_node:main',
],
},
)
ビルドと実行¶
cd ~/my_ws
colcon build --symlink-install
source install/setup.bash
ros2 run hello_action server_node
ros2 run hello_action client_node
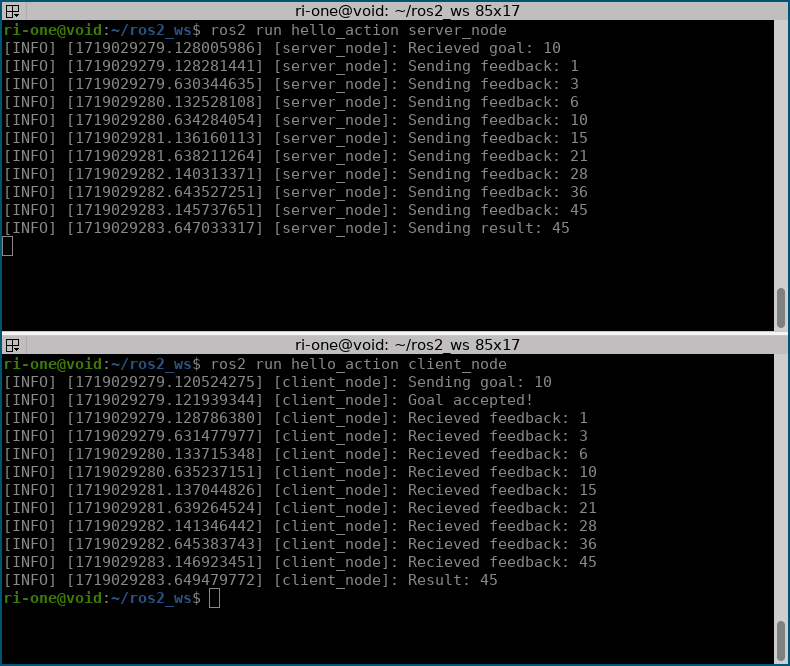
端末での実行画面¶