Hello world¶
今回は簡単なパブリッシャ、サブスクライバを作ってHello worldが出来るパッケージを作ります。
初めてのワークスペース¶
ワークスペースとはパッケージのソースコードを編集したり、実行したりするフォルダです。 ROS 2ではパッケージという単位でソースコードを管理します。
ここではmy_wsというワークスペースで作業します。
ホームディレクトリに新しくワークスペースフォルダを作りましょう。
mkdir ~/my_ws
cd ~/my_ws
my_wsのsrcディレクトリにhello_worldパッケージを作成します。
mkdir -p ~/my_ws/src
cd ~/my_ws/src
ros2 pkg create --build-type ament_python hello_world
--build-typeオプションで作成するパッケージの種類をしています。
ここではament_cmakeやament_pythonなどを指定できます。
treeコマンドでパッケージの構成を確認してみると以下のようになっています。
$ tree
.
├── hello_world
│ └── __init__.py
├── package.xml
├── resource
│ └── hello_world
├── setup.cfg
├── setup.py
└── test
├── test_copyright.py
├── test_flake8.py
└── test_pep257.py
3 directories, 8 files
このhello_worldパッケージはament_python形式なので上のようになっています。
注意
hello_world/__init__.pyやresouce/hello_worldファイルは空ファイルですが、パッケージに必要なので消さないでください。
コードの編集¶
今回はコピペで構わないので以下のPythonのコードをhello_world/pub_node.pyに書いてください。
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class Publisher(Node):
def __init__(self):
super().__init__("publisher")
self.text_pub = self.create_publisher(String, "text", 10)
self.timer = self.create_timer(1, self.timer_callback)
self.i = 0
def timer_callback(self):
msg = String()
msg.data = f"Hello world {self.i}"
self.text_pub.publish(msg)
self.get_logger().info(f"Publishing {msg.data}")
self.i += 1
def main(args=None):
rclpy.init(args=args)
node = Publisher()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
同じように以下のコードをhello_world/sub_node.pyに書いてください。
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class Subscriber(Node):
def __init__(self):
super().__init__("subscriber")
self.text_sub = self.create_subscription(String, "text", self.text_callback, 10)
def text_callback(self, msg):
self.get_logger().info(f"Subscribed {msg.data}")
def main(args=None):
rclpy.init(args=args)
node = Subscriber()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
package.xmlに依存関係を追加¶
package.xml内に以下の2行を追加してください。
<exec_depend>rclpy</exec_depend>
<exec_depend>std_msgs</exec_depend>
追加すると以下のようなpackage.xmlファイルになっていると思います。
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>hello_world</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="ri-one@todo.todo">ri-one</maintainer>
<license>TODO: License declaration</license>
<test_depend>ament_copyright</test_depend>
<test_depend>ament_flake8</test_depend>
<test_depend>ament_pep257</test_depend>
<test_depend>python3-pytest</test_depend>
<!-- この2行を追加 -->
<exec_depend>rclpy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>
setup.pyにエントリーポイントを追加¶
setup.pyのentry_pointsのconsole_scriptsに以下の2行を追加してください。
'pub_node = hello_world.pub_node:main',
'sub_node = hello_world.sub_node:main',
追加すると以下のようなsetup.pyファイルになっていると思います。
from setuptools import find_packages, setup
package_name = 'hello_world'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='ri-one',
maintainer_email='ri-one@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
# この2行を追加
'pub_node = hello_world.pub_node:main',
'sub_node = hello_world.sub_node:main',
],
},
)
console_scriptsの中の配列は実行名 = パッケージ名.ファイル名:関数の形式になっています。
ビルドと実行¶
~/my_wsでcolcon buildコマンドでビルドしてください。
cd ~/my_ws
colcon build
注意
必ず、ワークスペースのルートディレクトリ(~/my_ws)でcolcon buildコマンドを実行してください。
colcon buildコマンドを実行するとmy_wsに新たに、build、install、logディレクトリが作成されます。
$ ls
build install log src
新たに作られた3つのディレクトリは以下のようなファイルを含みます。
build- ビルド時に生成される一時的なファイルlog- ビルド時のログファイルinstall- ビルドで生成された実行可能ファイル
次にビルドして生成されたセットアップファイルをsourceもしくは.コマンドで読み込んでください。
source install/setup.bash
セットアップファイルを読み込んだら、2つ端末を用意してros2 runコマンドでパブリッシャとサブスクライバを実行してみましょう。
ros2 run hello_world pub_node
ros2 run hello_world sub_node
注釈
必ず、セットアップファイルを読み込んでからros2 runコマンドで実行するようにしましょう。
するとHello worldの文字列ともに数字が両方の端末とも出力されていることが分かります。
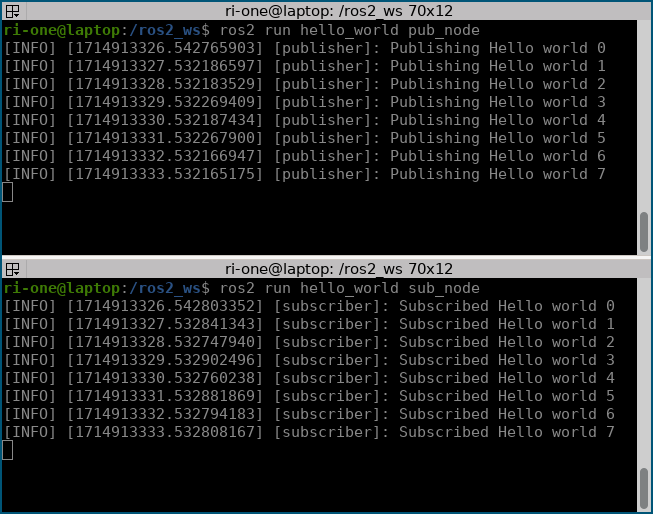
端末での実行画面¶
rqt_graphで通信の確認¶
rqt_graphという可視化ツールを使ってトピック通信の様子を見てみましょう。
もう1つ端末を開いてrqt_graphコマンドを実行しましょう。
rqt_graph
すると以下のように通信の様子がグラフで表されます。

rqt_graphでのトピック通信の様子¶
今回の場合、/publisherノードから/textトピックを介して/subscriberノードに通信が行われていることが分かります。