パラメータ¶
ROSではパラメータというものを設定することが出来ます。 これはプログラムを実行する前に値を任意に変更することが出来て、ソースコードを変えることなく値を自由に変えられます。
今回の目標¶
今回は以下のようなノードをもつhello_paramパッケージを作ってみましょう
multiply_node.pystd_msgs/Uint64型の/numberトピックからサブスクライブした数をm_numberパラメータの値を掛けて/multiplied_numberトピックにパブリッシュするm_numberパラメータはデフォルトでint型の2
パッケージの作成¶
ros2 pkg create --build-type ament_python hello_param
multiply_node.pyのコード¶
hello_param/multiply_node.pyを以下の内容で書き込む。
import rclpy
from rclpy.node import Node
from std_msgs.msg import UInt64
class Multiply(Node):
def __init__(self):
super().__init__("multiply_node")
self.number_sub = self.create_subscription(UInt64, "number", self.number_callback, 10)
self.double_number_pub = self.create_publisher(UInt64, "multiplied_number", 10)
self.declare_parameter("m_number", 2)
self.m = self.get_parameter("m_number").get_parameter_value().integer_value
def number_callback(self, sub_msg):
self.get_logger().info("Subscribed {}".format(sub_msg.data))
pub_msg = UInt64()
pub_msg.data = sub_msg.data * self.m
self.double_number_pub.publish(pub_msg)
self.get_logger().info("Publishing {}".format(pub_msg.data))
def main(args=None):
rclpy.init(args=args)
node = Multiply()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
setup.pyの編集¶
from setuptools import find_packages, setup
package_name = 'hello_param'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='ri-one',
maintainer_email='ri-one@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
# この1行を追加
'multiply_node = hello_param.multiply_node:main',
],
},
)
ビルドと実行¶
cd ~/my_ws
colcon build --symlink-install
source install/setup.bash
ros2 run hello_topic iteration_node
ros2 run hello_param multiply_node
次に作ったm_numberパラメータを3に変更してノードを実行してみましょう。
ros2 run hello_topic iteration_node
ros2 run hello_param multiply_node --ros-args -p m_number:=3
multiply_nodeが/numberトピックの3倍した数をmultiplied_numberトピックにパブリッシュしていれば成功!
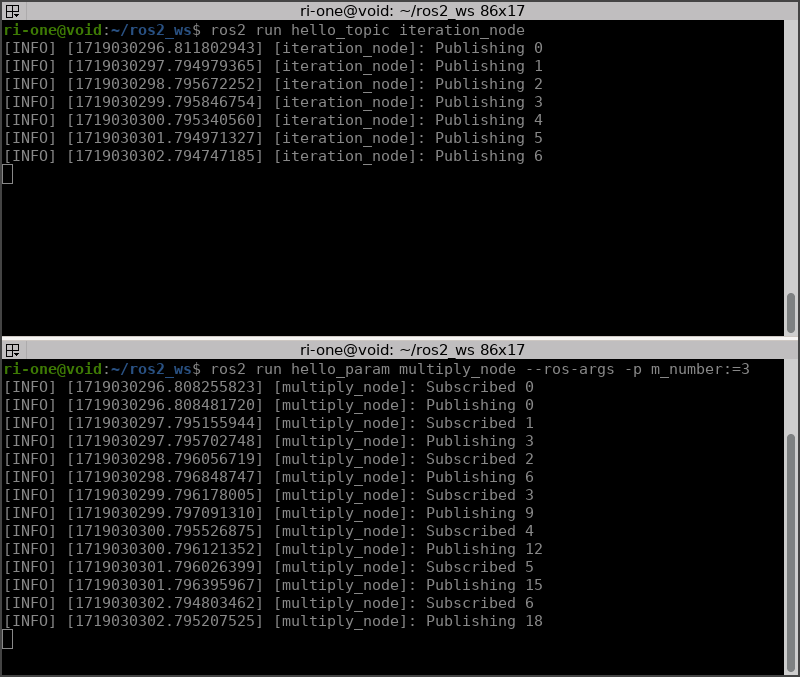
端末での実行画面¶