サービス通信¶
サービス通信ではクライアントとサーバが存在します。 クライアントはデータをリクエストしてサーバからのレスポンスを受け取り、サーバはクライアントからのリクエストに応じてレスポンスを送ります。 TCP/IP通信をイメージすると分かりやすいと思います。
今回の目標¶
今回は以下のようなノードをもつhello_serviceパッケージを作ってみましょう。
server_node.pyhello_msgs/Order型の/orderサービスからメッセージを受け取るサービスをリクエストしたクライアントにレスポンスを返す
client_node.pyhello_msgs/Order型のリクエストを/orderサービスに送って、サーバからレスポンスを受け取る
パッケージの作成¶
ros2 pkg create --build-type ament_python hello_service
server_node.pyのコード¶
hello_service/server_node.pyを以下の内容で書き込む。
import rclpy
from rclpy.node import Node
from hello_msgs.srv import Order
class Service(Node):
def __init__(self):
super().__init__("service_node")
self.order_service = self.create_service(Order, "order", self.order_service_callback)
self.get_logger().info("service is ready")
def order_service_callback(self, request, response):
self.get_logger().info(f"Recieved: {request.menu}")
response.message = f"へい!{request.menu}、お待ち!"
self.get_logger().info(f"Sending: {response.message}")
return response
def main():
rclpy.init()
node = Service()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == "__main__":
main()
client_node.pyのコード¶
hello_service/client_node.pyを以下の内容で書き込む。
import rclpy
from rclpy.node import Node
from hello_msgs.srv import Order
class Client(Node):
def __init__(self):
super().__init__("client_node")
self.order_client = self.create_client(Order, "order")
while not self.order_client.wait_for_service(timeout_sec=1.0):
self.get_logger().info("service not avilable, waiting...")
self.request = Order.Request()
def send_request(self, menu):
self.request.menu = menu
self.future = self.order_client.call_async(self.request)
rclpy.spin_until_future_complete(self, self.future)
return self.future.result()
def main():
rclpy.init()
node = Client()
menu = "ラーメン"
node.get_logger().info(f"Request: {menu}")
response = node.send_request(menu)
node.get_logger().info(f"Response: {response.message}")
node.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
setup.pyの編集¶
from setuptools import find_packages, setup
package_name = 'hello_service'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='ri-one',
maintainer_email='ri-one@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
# この2行を追加
'server_node = hello_service.server_node:main',
'client_node = hello_service.client_node:main',
],
},
)
ビルドと実行¶
cd ~/my_ws
colcon build --symlink-install
source install/setup.bash
ros2 run hello_service server_node
ros2 run hello_service client_node
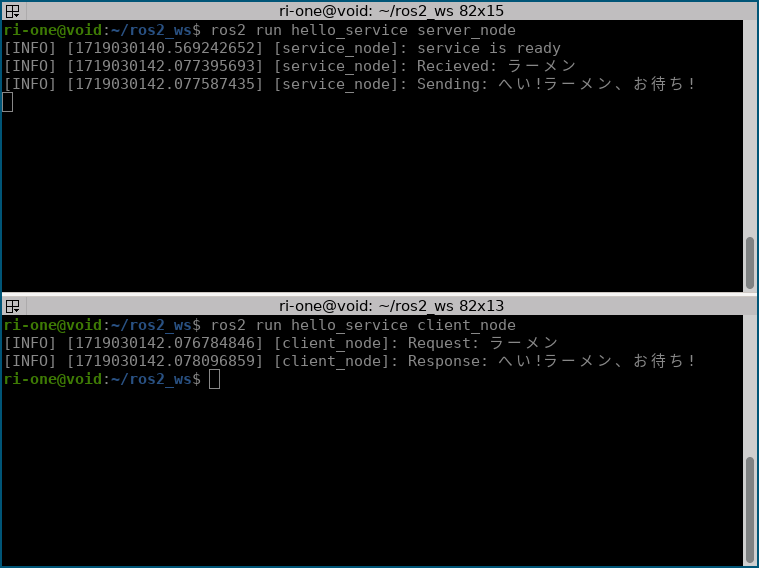
端末での実行画面¶