トピック通信¶
トピック通信ではデータを送るパブリッシャとデータを受け取るサブスクライバが存在します。 パブリッシャは任意のトピックにデータを連続的に送り続け、サブスクライバは任意のトピックに送られたデータを受け取ることができます。 UDP通信をイメージすると分かりやすいと思います。
今回の目標¶
今回は以下のようなノードをもつhello_topicパッケージを作ってみましょう
iteration_node.pystd_msgs/UInt64型の数字を一秒毎に/numberトピックにパブリッシュする送る数は一秒毎に1足される
double_node.pystd_msgs/UInt64型の/numberトピックをサブスクライブするこの時、受け取った数を2倍にして
/double_numberトピックにパブリッシュする
パッケージの作成¶
ros2 pkg create --build-type ament_python hello_topic
iteration_node.pyのコード¶
hello_topic/iteration_node.pyを以下の内容で書き込む。
import rclpy
from rclpy.node import Node
from std_msgs.msg import UInt64
class Iteration(Node):
def __init__(self):
super().__init__("iteration_node")
self.number_pub = self.create_publisher(UInt64, "number", 10)
self.timer = self.create_timer(1, self.timer_callback)
self.i = 0
def timer_callback(self):
msg = UInt64()
msg.data = self.i
self.number_pub.publish(msg)
self.get_logger().info(f"Publishing {msg.data}")
self.i += 1
def main(args=None):
rclpy.init(args=args)
node = Iteration()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
double_node.pyのコード¶
hello_topic/double_node.pyを以下の内容で書き込む。
import rclpy
from rclpy.node import Node
from std_msgs.msg import UInt64
class Double(Node):
def __init__(self):
super().__init__("double_node")
self.number_sub = self.create_subscription(UInt64, "number", self.number_callback, 10)
self.double_number_pub = self.create_publisher(UInt64, "double_number", 10)
def number_callback(self, sub_msg):
self.get_logger().info(f"Subscribed {sub_msg.data}")
pub_msg = UInt64()
pub_msg.data = sub_msg.data * 2
self.double_number_pub.publish(pub_msg)
self.get_logger().info(f"Publishing {pub_msg.data}")
def main(args=None):
rclpy.init(args=args)
node = Double()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == "__main__":
main()
setup.pyの編集¶
from setuptools import find_packages, setup
package_name = 'hello_topic'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='ri-one',
maintainer_email='ri-one@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
# この2行を追加
'iteration_node = hello_topic.iteration_node:main',
'double_node = hello_topic.double_node:main',
],
},
)
ビルドと実行¶
cd ~/my_ws
colcon build --symlink-install
source install/setup.bash
ros2 run hello_topic iteration_node
ros2 run hello_topic double_node
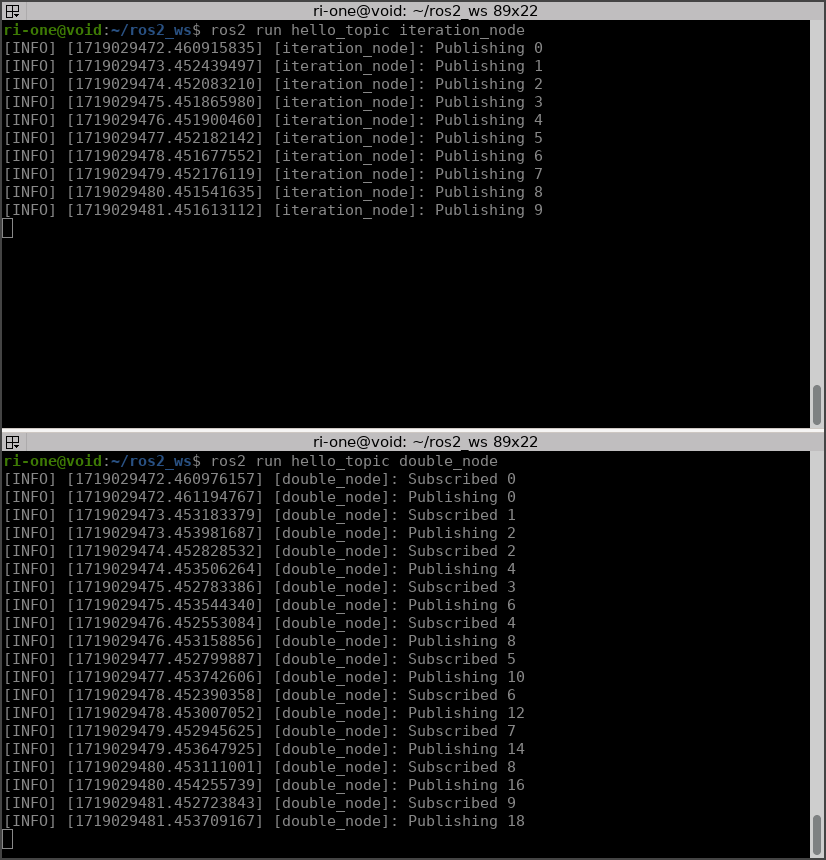
端末での実行画面¶
課題¶
前回の
自作メッセージ
で独自に作ったhello_msgsパッケージのhello_msgs/Person型のメッセージをパブリッシュ、サブスクライブするノードを書いてみましょう。
person_pub_node.pyhello_msgs/Person型のメッセージを/personトピックにパブリッシュするメッセージは1Hz間隔で、自分の名前と年齢を送る
person_sub_node.pyhello_msgs/Person型の/personトピックをサブスクライブするメッセージを受け取ったら、その内容を画面に出力する